1.1 Anschluss der Bauteile an den Mikrocontroller
| Website: | xplore-dna.net > Die DNA des digitalen Lernens! |
| Kurs: | T1-Car Sensors by Lauritz, Max & Torben |
| Buch: | 1.1 Anschluss der Bauteile an den Mikrocontroller |
| Gedruckt von: | Gast |
| Datum: | Mittwoch, 15. Oktober 2025, 15:07 |
1. Materialien
Für die Umsetzung dieses Teilprojektes werden folgende Materialen benötigt:
- Arduino UNO
- Arduino Taster
- LED für einen Arduino
- Ethernet Shield ENC28J60
- 2 KFZ-Temperatursensoren mit der Bauteilenummer "1J0 919 379A"
- Breadboard
- Jumper Wire
- 1 * 1k Ohm Widerstand
- 1 * 10k Ohm Widerstand
- 2 * 2,2k Ohm Widerstand
- LAN-Leitung
- SPS (wird auch für die anderen Teilprojekte benötigt)
2. Anschluss einer LED
Als erste Schritte werden alle Bauteile an den Arduino UNO angeschlossen. Hierbei wird mit der LED begonnen, welche später zum Anzeigen einer Datenübertragung benutzt wird. Hierfür wird auf dem Arduino ein digitaler Ausgang benutzt. Es ist dabei egal, welcher digitaler Ausgang benutzt wird, daher wird in diesem Beispiel der digitale Ausgang "3" benutzt. Beim Anschluss ist drauf zu achten, dass die Anode (+) der LED mit dem digitalen Ausgang verbunden wird. Die Kathode (-) wird über einen Widerstand (1k Ohm) mit der Masse des Arduinos verbunden.
Da in diesem Projekt noch weitere Bauteile ergänzt werden, welche mit Masse und Plus versorgt werden müssen, wird das ganze auf ein Breadboard gesteckt. Dies hat den Vorteil, dass Plus und Masse vom Arduino lediglich einmal auf das Breadboard gezogen werden müssen und dann für mehrere Verbraucher zur Verfügung stehen.
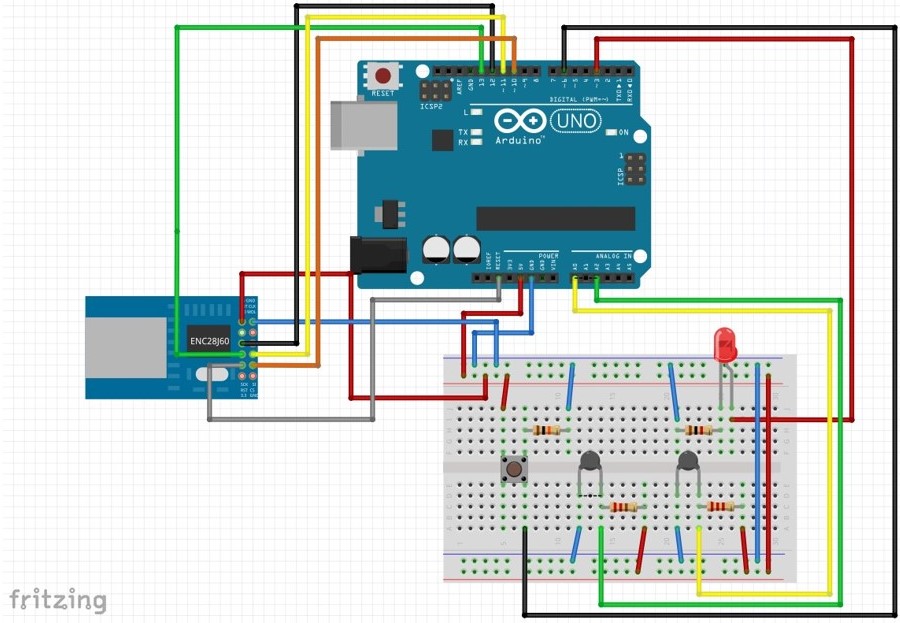
Abbildung 1 Schaltplan, Quelle BBS2 Wolfsburg
3. Anschluss eines Tasters
Nachdem die LED angeschlossen wurde, wird der Taster angeschlossen. Dieser dient dazu auf Knopfdruck die Daten der Sensoren an die SPS zu schicken. Hierbei ist darauf zu achten, dass zwei der Anschlüsse des Tasters (die mit dem geringeren Abstand zueinander) auch im nicht gedrückten Zustand eine leitende Verbindung haben (siehe Abbildung 1). Da der Taster auf Knopfdruck etwas auslösen soll, wird ein Eingang benötigt. Hierzu wird ein digitaler Pin benutzt, jedoch darf es nicht derselbe Pin sein, welcher auch für die LED benutzt wird. In diesem Beispiel wird der digitale Pin "6" benutzt. Der Taster wird wie in der Abbildung 2 mit Plus, Masse (über einen Widerstand mit 10k Ohm) und dem digitalen Pin verbunden. Die leitende Beinchen des Taster verlaufen in diesem Fall von oben nach unten.

Abbildung 1 Taster, Quelle BBS2 Wolfsburg
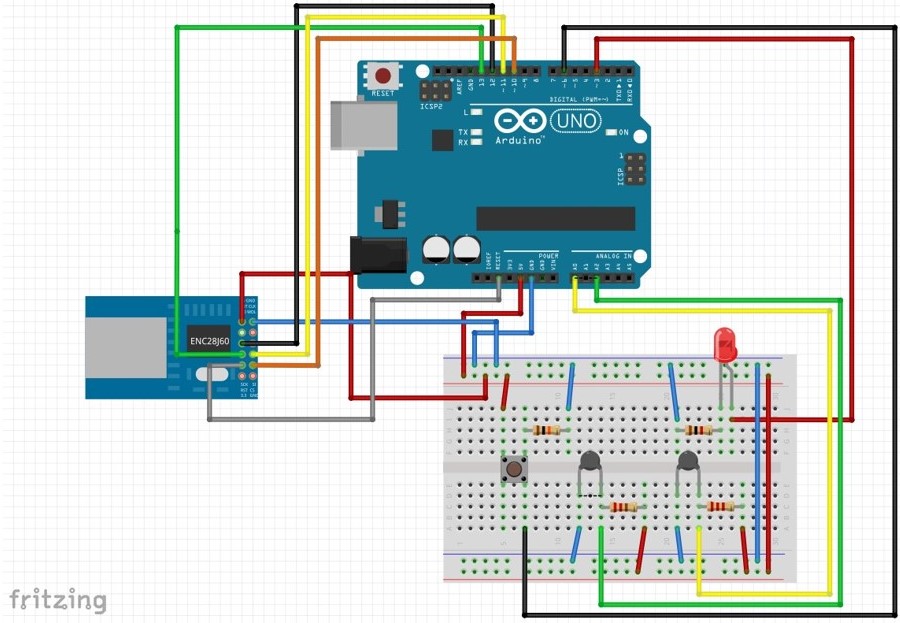
Abbildung 2 Schaltplan, Quelle BBS2 Wolfsburg
4. Anschluss des Ethernet Shields
Als nächsten Schritt wird das Ethernet Shield an den Arduino angeschlossen, da dieser selbst keine Netzwerkverbindung aufbauen kann. Hierfür werden die Pins 10 - 13 benötigt, da es sich hierbei um die SPI-Schnittstelle des Arduinos handelt. Dies ist eine serielle Schnittstelle, ähnlich zum USB-Anschluss in einem PC. In der nachfolgenden Auflistung ist die Pinbelegung des Ethernet Shield zu sehen, diese ist auch dem Schaltplan zu entnehmen.
Ethernet Shield auf Arduino
- 5V auf 5V
- GND auf GND
- SCK auf PIN 13
- SO auf PIN 12 ---> MISO: Master IN Slave OUT (Senden von Slave zu Master)
- ST auf PIN 11 ---> MOSI: Master OUT Slave IN (Senden von Master zu Slave)
- CS auf PIN 10
- RST auf RESET
Zusatzerklärung zur SPI-Schnittstelle:
Die SPI-Schnittstelle ist lediglich einmal auf dem Arduino vorhanden, sie kann jedoch von mehreren Geräten benutzt werden. Damit dies funktioniert wird der CS-PIN benötigt, welcher für jedes angeschlossene SPI-Gerät individuell vergeben wird (also Gerät 1 z.B. PIN 10 und Gerät 2 z.B. PIN 9). Möchte man nun Auswählen von welchem Gerät Daten abgerufen werden sollen, wird der CS-PIN des Gerätes von welchem die Daten kommen sollen auf "LOW" gesetzt und alle anderen auf "HIGH". Über diese Zuordnung wissen Arduino und die angeschlossenen Geräte, wer Daten sendet.
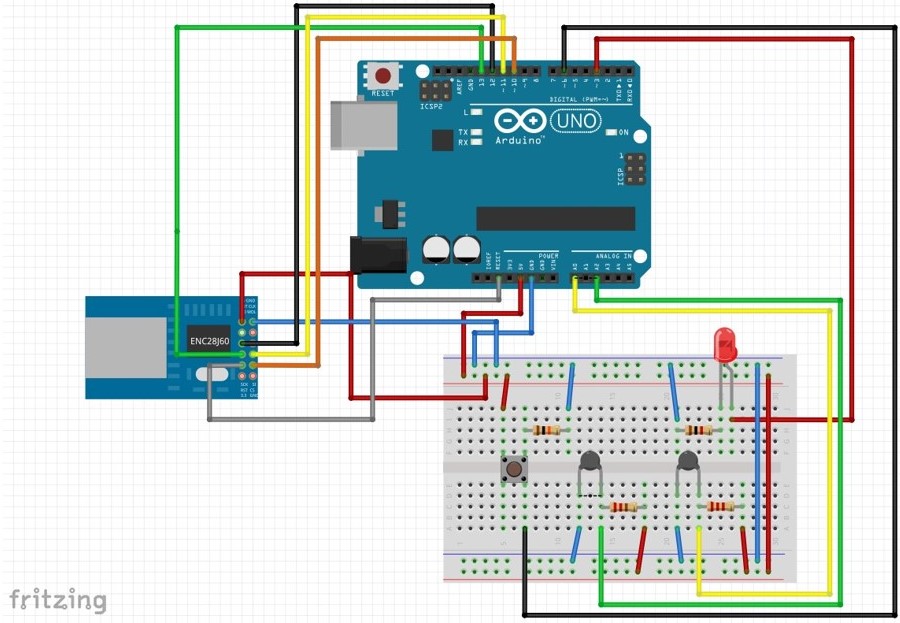
Abbildung 1 Schaltplan, Quelle BBS2 Wolfsburg
5. Anschluss des Sensors
Als letzten Schritt, bevor es an die Programmierung geht, werden die KFZ-Sensoren (Artikelnummer siehe Materialien) angeschlossen. Bei diesen Sensoren handelt es sich um NTC-Widerstände, also Widerstände, welche mit steigender Temperatur sinken. Um einen Vergleich der Sensoren zu ermöglichen werden zwei dieser Sensoren benötigt, es kann jedoch auch über einen Sensor lediglich die Temperatur bestimmt werden (dies liegt daran, was Sie vorhaben). Zur Bestimmung des Widerstandes der Sensoren wird ein Widerstand von 2,2 kOhm in Reihe zum Sensor geschaltet. Dies hat den Vorteil, dass so die Spannung zwischen Sensor und Widerstand auf einen analogen Eingang des Arduinos gegeben werden kann. Aus dieser Spannung und dem Wert des Widerstandes kann über das ohmsche Gesetz der Widerstandswert des Sensors und somit die Temperatur des Sensors bestimmt werden (hierzu später mehr). Für die Spannung zwischen Widerstand und Sensor kann jeder beliebige analoge Eingang ausgewählt werden. In diesem Beispiel werden die analogen Eingänge "A0" und "A2" benutzt. Der Anschluss von 5V und Masse sind dem Schaltplan (Abbildung 1) zu entnehmen.
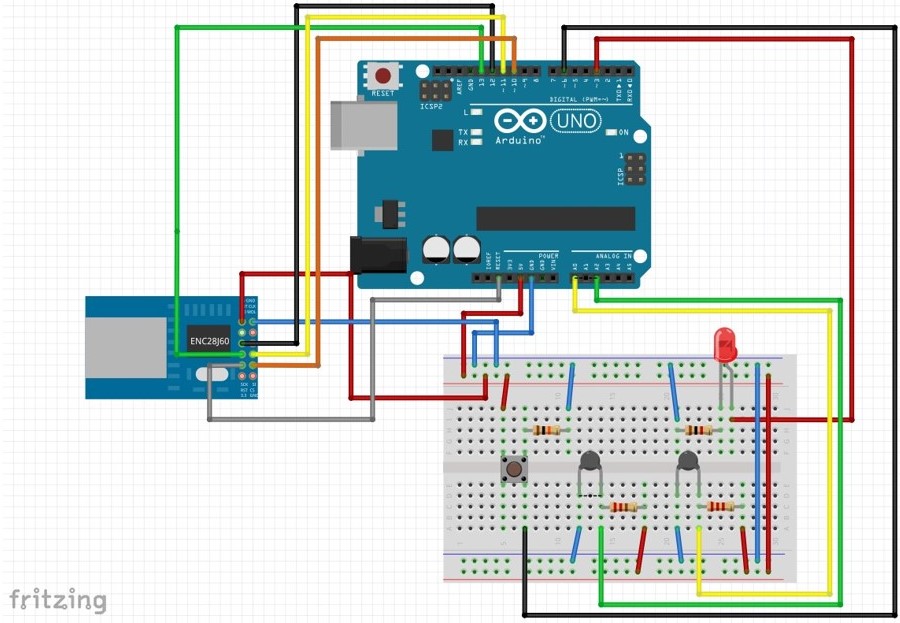
Abbildung 1 Schaltplan, Quelle BBS2 Wolfsburg