Bedienung
Lernziele:
- Umgebung des SmartPads kennenlernen
- sichere Bedienung des Roboters am SmartPad
Abgesehen von den Sicherheitsvorkehrungen, die immer oberste Priorität haben, kommt es jetzt auf die Steuerung und Programmierung an. Sollte es dennoch zu einem Auslösen der Sicherheitseinrichtungen kommen, kann die Anlage mithilfe der Bedienungsanleitung wieder quittiert werden.
Das smartPad
Im Mittelpunkt des Ganzen steht das smartPad, welches als Bedien- und Anzeigemodul dient. Sowohl der Touchscreen, als auch die Knöpfe und Schalter helfen bei einer einfachen Handhabung. Die jeweiligen Funktionen dieser Elemente werden mit Hilfe der Bilder erklärt. Es wird sich dabei auf die wichtigsten Bestandteile beschränkt, die für eine vollständige Bedienung nötig sind.

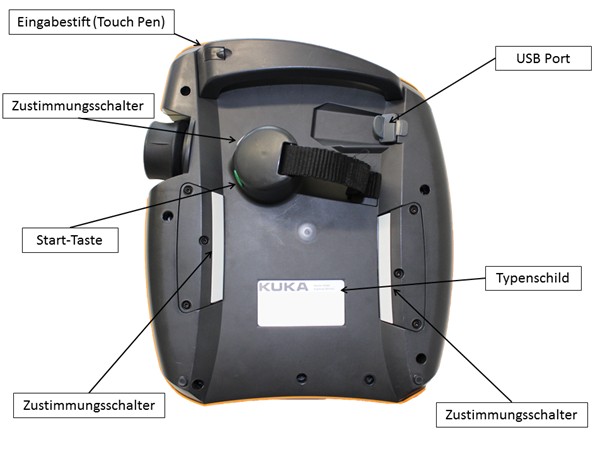
Zustimmungsschalter: nicht gedrückt = nicht quittiert
Mittelstellung = quittiert (Roboter kann bewegt werden)
durchgedrückt = Not-Halt
Der Zustimmungsschalter ist eine zusätzliche Sicherheitseinrichtung beim
Verfahren des Roboters im Handbetrieb. Es reicht z.B. nicht aus, nur die Verfahrenstasten
zu betätigen, da die Roboterantriebe erst über diese Zustimmung freigeschaltet
werden
Nun wird im Einzelnen auf die Funktionen eingegangen, die für den Betrieb wichtig sind.
Über die Taste „Hauptmenü“ gelangt man zu dem dargestellten Schirmbild. An dieser Stelle können verschiedene Menüpunkte ausgewählt werden. So erfolgt z.B. die Wiederherstellung einer Datei oder die Anzeige der Ist-Position über die unterschiedlichen Pfade.
Das Bild zeigt beispielhaft das Hauptmenü.

Die Statustasten, welche in diesem Fall die Greifersteuerung (Gripper&SpotTech) übernehmen, sind am linken Rand des Bildschirmfensters zu finden. Durch Drücken des Zustimmungsschalters und der unteren Taster wird der Greifer geöffnet bzw. geschlossen. Die beiden oberen Tasten dienen lediglich zur Wahl des Werkzeugs, welche aber in diesem Fall entfällt.
Über das Symbol  oder
oder  wird die Verfahrensart gewählt und damit die
Belegung der Verfahrenstasten entsprechend angepasst.
wird die Verfahrensart gewählt und damit die
Belegung der Verfahrenstasten entsprechend angepasst.
Über das Icon am oberen rechten Rand des smartPads, welches aktuell auf WORLD eingestellt ist, lässt sich das Koordinatensystem der SpaceMouse einstellen.
Über das drunterliegende Icon, welches gerade auf ACHSEN eingestellt ist, lässt sich das Koordinatensystem der Verfahrenstasten einstellen.
Die Einstellung der Geschwindigkeit erfolgt unter anderem
über die Tasten „Hand“- und „Programm-Override“(HOV und POV). Je nachdem, ob
gerade einzelne Komponenten des Roboters oder ein Programmablauf stattfindet,
kann die prozentuale Geschwindigkeit (0 – 100 %) gewählt werden.
Kennzeichnet
sind diese beiden Varianten durch die Symbole  und
und  auf dem smartPad.
auf dem smartPad.
Als wichtigstes Element gilt die Statusleiste am oberen Bildschirmrand.
Neben der Geschwindigkeitsanzeige, über die ebenfalls
Einstellungen getroffen werden können, kann die Programmablaufart variiert werden. Zwischen den Optionen
„GO“, „Bewegung“ und „Einzelschritt“ kann entschieden werden.
Geschwindigkeitseinstellung

Einstellung der Bewegungsart

GO
Das Programm wird ohne Pause bis zu dem Programmende durchlaufen.
BEWEGUNG
An jedem Punkt einer Bewegung wird gehalten. Um die Bewegung fortzusetzen, muss jedes Mal erneut die Start-Taste betätigt werden.
EINZELSCHRITT
Das Programm wird mit einem Stopp nach jeder Programmzeile abgearbeitet. Nach der jeweiligen Zeile muss der Roboter wieder gestartet werden.
Die Statussymbole signalisieren unter anderem, welche
Betriebsart gerade angewählt ist. Zudem kann über „R“ eine Abwahl des Programms
geschehen oder das Programm auch einfach zurückgesetzt werden. Ein Zurücksetzen
des Programms kann deshalb sinnvoll sein, weil nicht immer unbedingt die erste
Programmzeile angewählt sein muss. Durch das Zurücksetzen wird gewährleistet,
dass der Ablauf in jedem Fall von vorne beginnt.
Betriebsarten
Der Roboter kann in vier unterschiedlichen Betriebsarten verfahren werden, welche über den Verbindungsmanager ausgewählt werden können. Darunter sind zwei Varianten für den Handbetrieb und zwei für den automatischen Ablauf eines Programms.
- T1: Test-Betriebsart Manuell Reduzierte Geschwindigkeit
- T2: Test-Betriebsart Manuell Hohe Geschwindigkeit
- AUT: Automatikbetrieb
- EXT: Automatikbetrieb Extern
Erklärung der Betriebsarten
Die Programmierung erfolgt grundsätzlich in der Betriebsart T1 (Handbetrieb). Ist das Programm fertiggestellt, muss zuerst ein manueller Testablauf durchfahren werden, bevor in eine der automatischen Betriebsarten gewechselt werden darf. Grund dafür ist, dass Fehlprogrammierungen so noch kontrolliert entdeckt werden können. Ohne diese zusätzliche Sicherheitsmaßnahme können Personen- und Sachschäden entstehen.
Wurde das Programm in der Betriebsart T1 ausreichend getestet, kann für eine höhere Geschwindigkeit in die Betriebsart T2 gewechselt werden. Das sollte allerdings nur gemacht werden, wenn der Bediener genug Erfahrung im Umgang mit dem Roboter hat. Für die Bewegung einzelner Roboterkomponenten und für den Handbetrieb wird daher im Lehrgang immer die Betriebsart T1 gewählt.
Trotzdem kann man einige Vorteile für einen Handbetrieb mit hohen Geschwindigkeiten (T2) finden. Es lässt sich z.B. gut erkennen, wie die einzelnen Bewegungen zusammenpassen und ob ein flüssiger Ablauf gewährleistet ist. Der Bediener hat trotzdem weiterhin die Kontrolle über den Roboter. Um die Antriebe freizugeben und den Roboter zu fahren, ist durchgängig eine Aktion des Bedieners gefordert (Zustimmungstaste und Start-Taste)
Wurde das erstellte Programm im Handbetrieb vollständig getestet, kann in den Automatikbetrieb gewechselt werden. Zuerst muss immer das Programm zurückgesetzt werden (unter „R“), um den Ablauf von vorne zu starten. Generell gibt es die Unterscheidung zwischen AUT und EXT. In jedem Fall wird das Programm nach Betätigen des Start-Tasters selbstständig durchlaufen. Es ist also keine Aktion des Bedieners mehr erforderlich. Folglich bedeutet das auch, dass das Programm keine Fehler mehr aufweisen darf, da es sonst zu Verletzungen und Schäden kommen kann. Eine geeignete Wahl der Geschwindigkeit ist unbedingt notwendig. Die Bezeichnung EXT kann als Erweiterung des normalen Automatikbetriebs AUT verstanden werden. Der Ablauf ist nicht nur voll automatisch, sondern der Roboter wird noch um eine übergeordnete Steuerung erweitert (z.B. eine SPS).
Satzanwahl
Für eine Orientierung im
Roboterprogramm dient ein kleiner Pfeil am linken Rand des Programmtextes (Zeile 4).

Dieser zeigt an, in welcher Programmzeile sich das Programm gerade befindet. Betätigt man den Zustimmungstaster und die Start-Taste gleichzeitig, verfährt der Roboter gemäß der darauf folgenden Programmzeilen. Der darüber liegende Programmablauf wird durchlaufen, wenn das Ganze mit der Start-Rückwärts-Taste wiederholt wird.
Soll nun zu einem bestimmten
Punkt im Programm gesprungen werden, z.B. der Grundstellung, kann diese
markiert und durch den Button „Satzanwahl“ bestätigt werden. Wird nun der Zustimmungsschalter
und die Start-Taste gedrückt, fährt der Roboter direkt zu dem
angewählten Punkt. Dabei wird kein Bewegungsablauf eingehalten, sodass die
Geschwindigkeit nicht allzu hoch eingestellt sein sollte. Zudem sollte
sichergestellt werden, dass keine Teile, wie z.B. die Rutschen, im Weg sind und
es zu keinen Kollisionen kommt.
