Roboterjustage
Lernziele:
- Prinzip der Roboterjustage kennenlernen
- Justage sicher durchführen
Roboterjustage
Warum muss ein Roboter justiert werden?
Nur wenn ein Industrieroboter vollständig und richtig justiert ist, kann er optimal genutzt werden. Nur dann weist er seine volle Punkt- und Bahngenauigkeit auf. Ist ein Roboter nicht justiert, kann er lediglich achsenspezifisch verfahren werden.
Wie werden Roboter justiert?
Ein kompletter Justagevorgang beinhaltet das Justieren jeder einzelnen Achse. Es wird jeder Roboterachse ein Referenzwert zugewiesen. Somit weiß die Robotersteuerung, wo sich die Achse befindet. Mithilfe eines technischen Hilfsmittels (EMD - Electronic Mastering Device) wird jeder Achse an ihrer mechanischen Nullstellung ein Wert zugewiesen (z.B. 0°). Da somit die elektrische und mechanische Position der Achsen in Übereinstimmung gebracht werden, erhält jede Achse einen eindeutigen Winkelwert. Die Justagestellung ist bei vielen Robotern ähnlich, aber nicht gleich.

Wann muss justiert werden?
Grundsätzlich muss der Roboter immer justiert sein. In den folgenden Fällen muss die Justage durchgeführt werden:
- Inbetriebnahme des Roboters
- wenn Komponenten ausgetauscht wurden, z.B. der Motor
- nach mechanischen Reparaturen z.B. nach einer Kollision
Vor Instandhaltungsmaßnahmen ist es sinnvoll, die aktuelle Justage zu prüfen. Bei einem dejustierten Roboter sind die Software-Endschalter deaktiviert. Der Roboter kann gegen die Puffer an den Endanschlägen fahren, wodurch er beschädigt werden kann. Ein dejustierter Roboter sollte möglichst nicht verfahren oder die Geschwindigkeit so weit wie möglich reduziert werden.
Wie wird beim Justieren vorgegangen?
Justiert wird, indem der mechanische Nullpunkt der Achse ermittelt wird.
Dabei bewegt sich die Achse so lange, bis der Messstift die
Justagekerbe einmal abgefahren hat. Anschließend wird der Mittelwert
zwischen Anfang und Ende der Kerbe ermittelt. Der tiefste Punkt der
Messkerbe wird berechnet und als Justagewert übernommen. Jede Achse ist
daher mit einer Justagepatrone und einer Justagemakro ausgestattet.
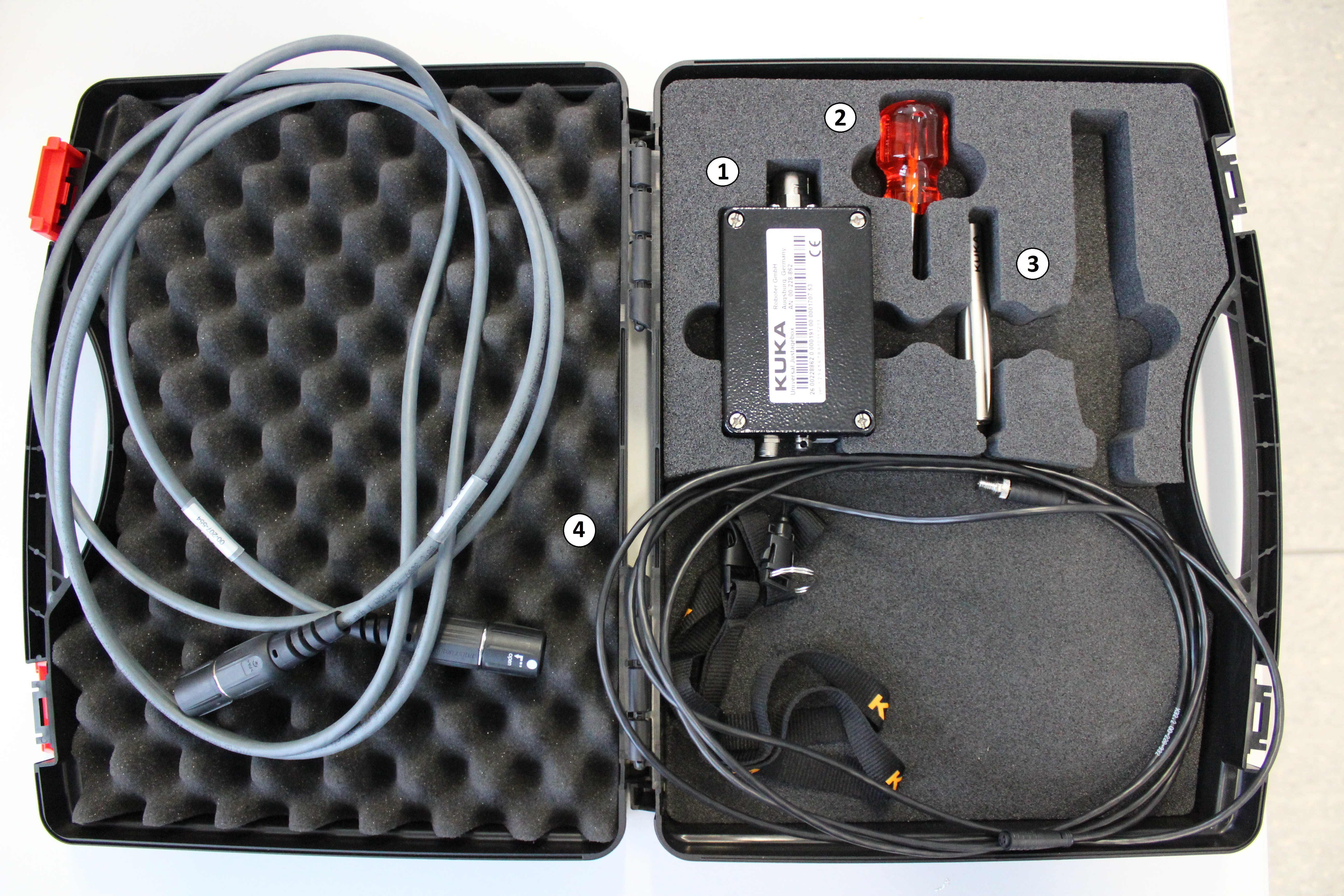
Das Justageset umfasst folgende Bauteile:
1) Justagebox
2) Schraubendreher
3) EMD (MEMD = Micro Electronic Mastering Device )
4) Leitungen
Das folgende Video zeigt, wie die Justage am Roboter durchgeführt wird:
Das Justiermenü findet man wie folgt:
Im Hauptmenü > Inbetriebnahme > Justieren > EMD > Standard > Justage prüfen
Justage der Achse A6
Die Achse A6 wird im Unterschied zu den Achsen A1-A5 ohne EMD justiert. Um die Achse in Justagestellung zu bringen, muss das Werkzeug abgebaut werden und die Strichmarkierungen abgeglichen werden.
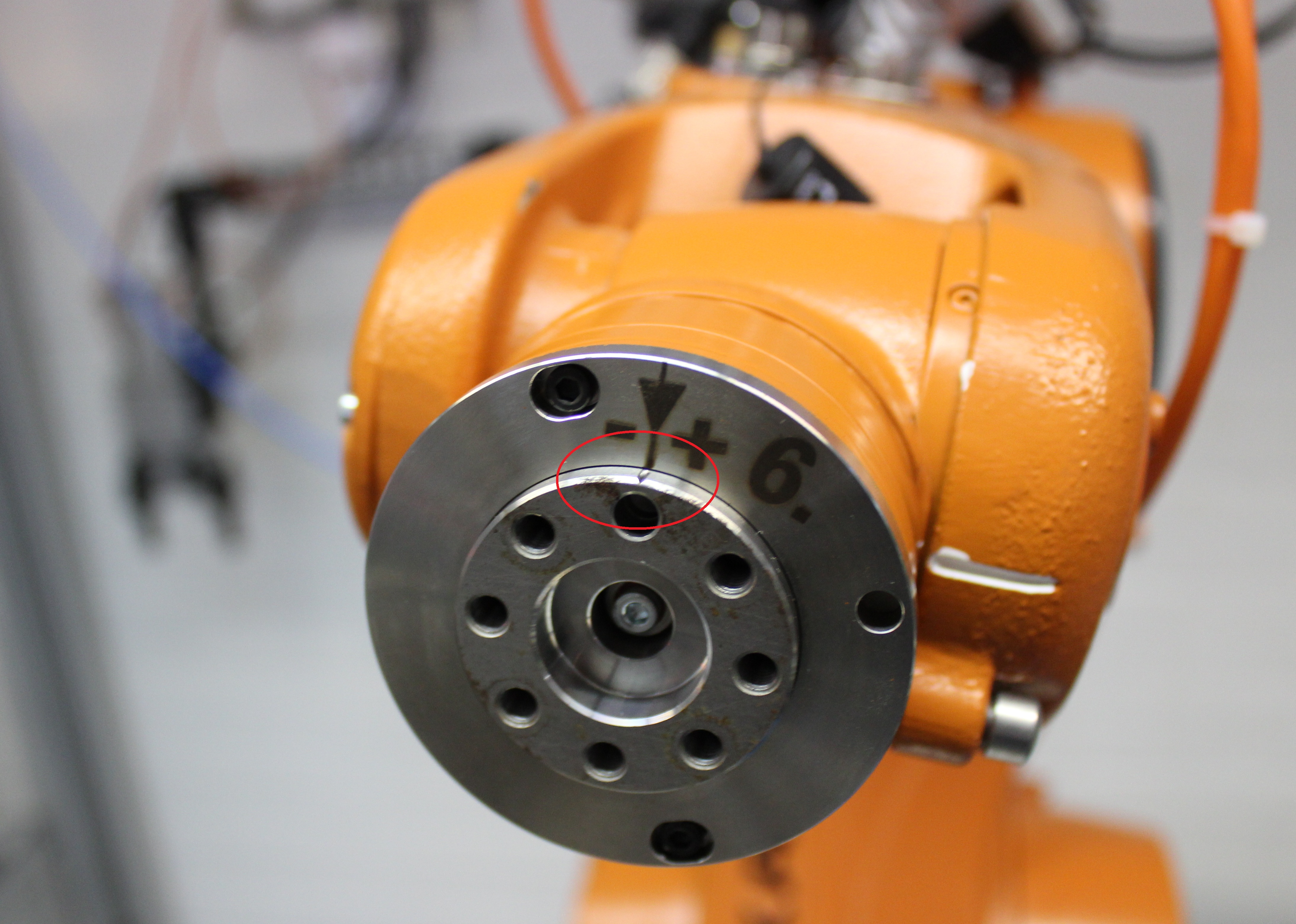
Um die in Justagestellung stehende Achse jetzt zu justieren, muss im Menü unter Justieren -> Referenz gewählt werden. Hier wird Achse A6 angezeigt und es kann justiert werden. Anschließend kann das Fenster geschlossen werden und die Justage ist vollständig. Die Leitung, Justagebox und das EMD können jetzt entfernt werden.
Anmerkung:
In diesem Lehrgang wird nur auf die Standard Justage eingegangen. Bei Robotern mit hoher Genauigkeitsanforderung, die mit verschiedenen Lasten arbeiten, muss allerdings eine Justage mit Lastkorrektur durchgeführt werden. Um die Genauigkeit des Roboters nicht negativ zu beeinflussen, muss die statische Belastung am Flansch des Roboters berücksichtigt werden.