Programm des UR3e Cobots
Im Folgenden ist das Roboterprogramm dargestellt.
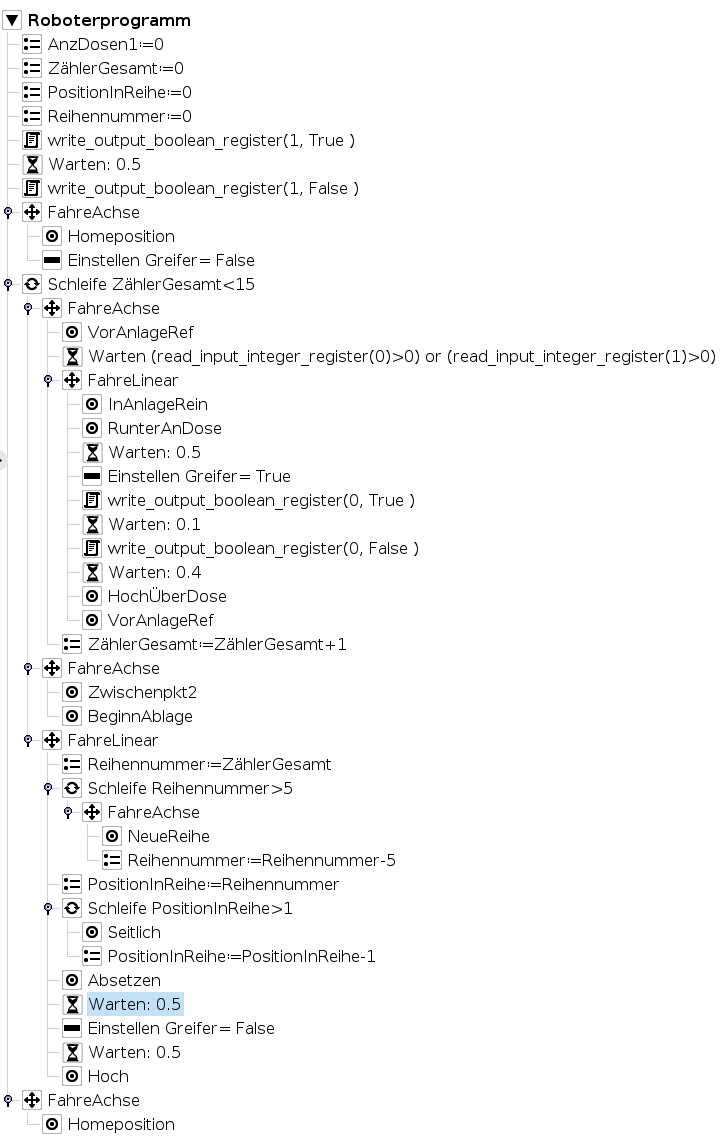
Als erstes werden die Variablen auf null gesetzt. Der ZählerGesamt speichert die Anzahl der insgesamt abgestellten Dosen, die Variablen PositionInReihe und Reihennummer werden später benötigt, um die Dosen Reihe für Reihe abzustellen. Anschließend wird mit dem Befehl "write_output_boolean_register" das TIA-Portal-Programm zurückgesetzt und die Homeposition angefahren. Außerdem wird der Greifer auf die richtige Öffnungsbreite gestellt.
Als Schleife, bis zu einer Dosenzahl von 15, wird nun der Hauptablauf durchgeführt. Der Referenzpunkt vor der Anlage, VorAnlageRef wird angefahren, hier wartet der Roboter auf das Signal der Anlage, dass eine Dose fertig ist. Nun führt der Roboter die Bewegung in die Anlage hinein und abwärts an die Dose ran. Der Greifer nimmt die Dose, außerdem wird das Signal zum Herunterzählen an die Anlage geschickt. Dann fährt der Roboterarm wieder vor die Anlage, setzt den ZählerGesamt um eins höher und fährt mit der Dose über die Tischoberfläche, um die Behälter abzustellen.
Die Dosen werden in Reihen von jeweils fünf Stück abgestellt, hierzu dienen die beiden Schleifen im unteren Programmteil. Hat der Roboter die jeweils richtige Position erreicht, stellt er die Dose ab, fährt wieder in seine Startposition vor der Anlage und wartet auf den neuen Zählstand der Anlage. Der Prozess wird solange wiederholt, bis 15 Dosen abgefüllt wurden, dann fährt der Roboter zurück in seine Homeposition und beendet das Programm.