Verkabelung
Stromversorgung
Nun ist der Roboter bereits aufgebaut, jedoch fehlen die Stromversorgung und die Ansteuerung. Dazu werden zunächst die Servos über eine externe Stromquelle (z.B Labornetzteil) mit 5V versorgt, wobei es sehr wichtig ist polaritätsrichtig zu arbeiten. Dafür müssen die mittleren, roten Leitung der Servos jeweils an Plus und jeweils die Dunkleren der beiden anderen Leitungen an Minus angeschlossen werden.
Bei dem Bluetooth Modul ist auf der Rückseite vermerkt, wo Minus (GND) und Plus (VDC) angeschlossen werden müssen. Es ist darauf zu achten, dass der Strom durch die Servos groß genug ist, damit sie sich vernünftig bewegen.
Datenleitungen
Schlussendlich soll der Roboter über eine App gesteuert werden, die ein Bluetooth Signal an das Modul sendet. Dafür müssen jetzt die richtigen Datenleitungen gelegt werden. Dazu muss zuerst das Bluetooth Modul mit dem Arduino verbunden werden.
Damit das Signal nun zu den Servos gelangt, müssen die Daten übermittelt werden. Diese werden vom Arduino über die übrige Leitung des Servos transportiert. Um das zu realisieren muss jeweils eine Datenleitung an einen Digitalpin des Arduinos gesteckt werden, sodass am Ende 5 Pins mit den Servos und 2 Pins mit dem Modul belegt sind.
Schaltplan
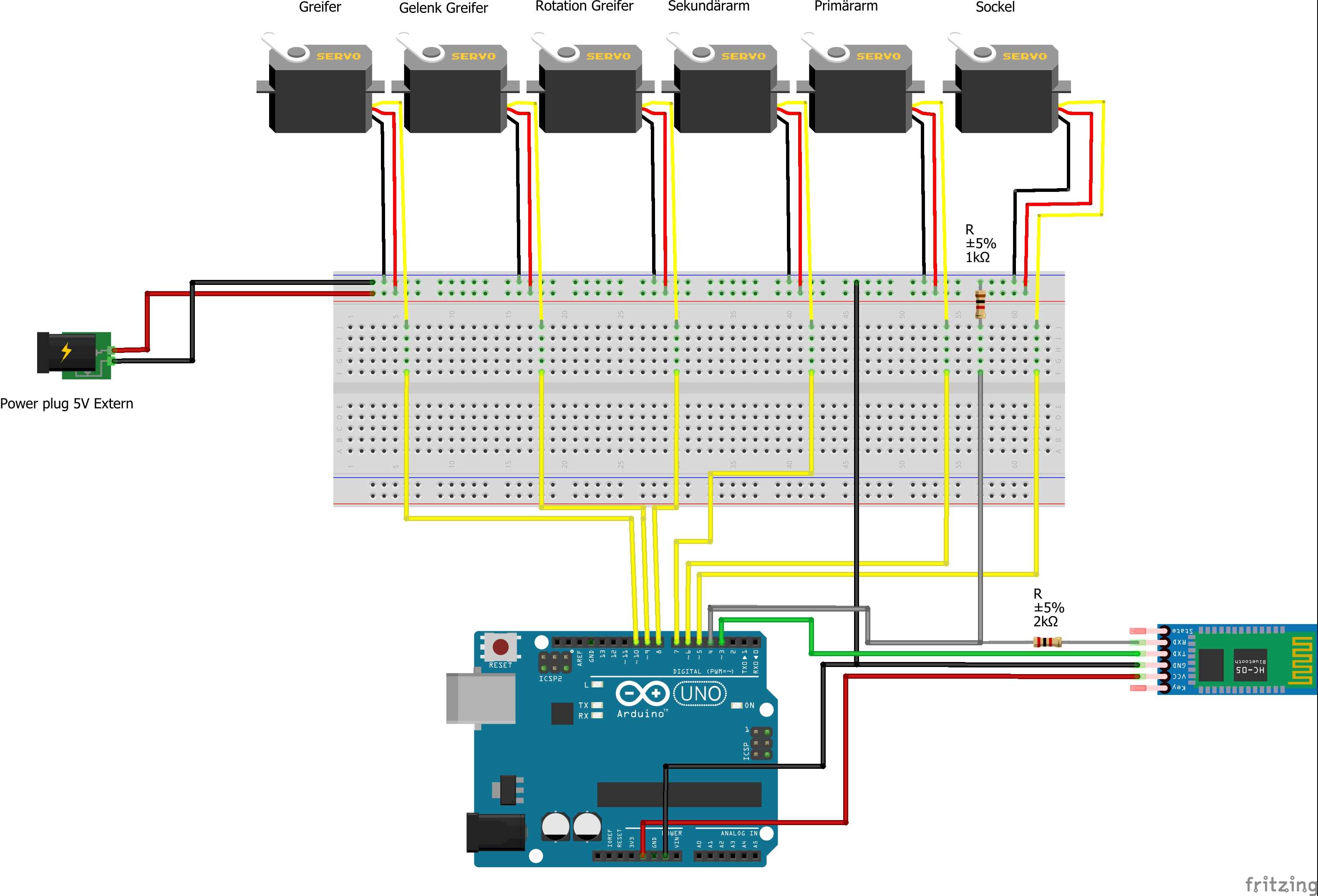
- Greifer = Pin 10
- Neigung = Pin 9
- Rotation = Pin 8
- Sekundär-arm = Pin 7
- Primär-arm = Pin 6
- Sockel = Pin 5