Verkabeln des Breadboards
Abbildung 1 zeigt euch, wie der ESP32 mit dem Servo und dem Motor verbunden werden soll:
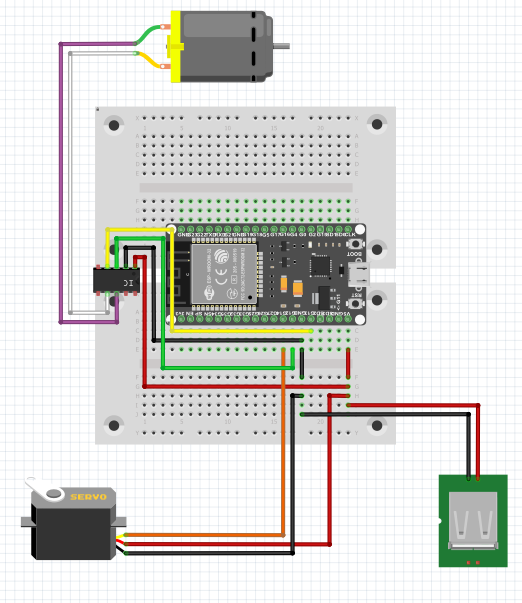
Abbildung 1: Schaltplan
Quelle: BBS2 Wolfsburg
PIN D12 - Vorwärtsfahren
PIN D13 - Rückwärtsfahren
PIN D14 - Servo-Signal
Falls ihr einen anderen Motortreiber vorliegen habt, verbindet diesen nur mit Pin 12 dieser ist für das Vorwärtsfahren zuständig.
Am Ende empfiehlt sich, alle Steckleitungen flach zu biegen, sodass diese beim Fahren nicht stören.
Der USB Anschluss dient zur späteren Spannungsversorgung des T1. Durch Anschluss an den externen 5 V und GND Pin startet der ESP32 automatisch, sobald später eine Powerbank angeschlossen wird.
Eine Versorgung der Schaltung über den Micro-USB des ESP32 ist nicht möglich, da dann alle Ströme für den Servo und den Motortreiber über die Platine des ESP32 fließen würden, dieser ist dafür nicht ausgelegt und kann sonst zerstört werden.
Final könnte das Breadboard dann so aussehen:
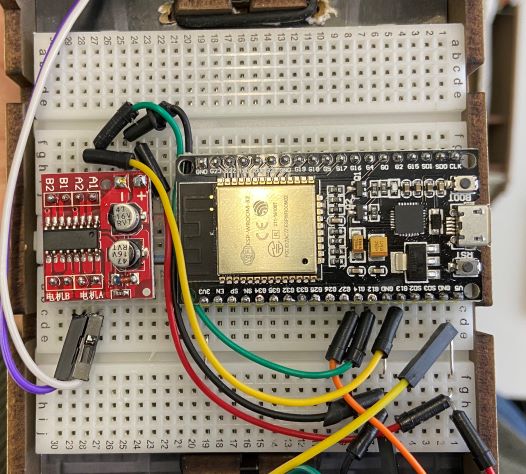
Abbildung 2: Aufbau des Breadboards
Quelle: BBS2 Wolfsburg