Pulsweitenmodulation (PWM)
Die Ansteuerung des Servomotors funktioniert über die Pulsdauermodulation (englisch: pulse width modulation; kurz: PWM). Bei der Pulsdauermodulation wird die Pulsdauer eines Rechteckpulses moduliert.
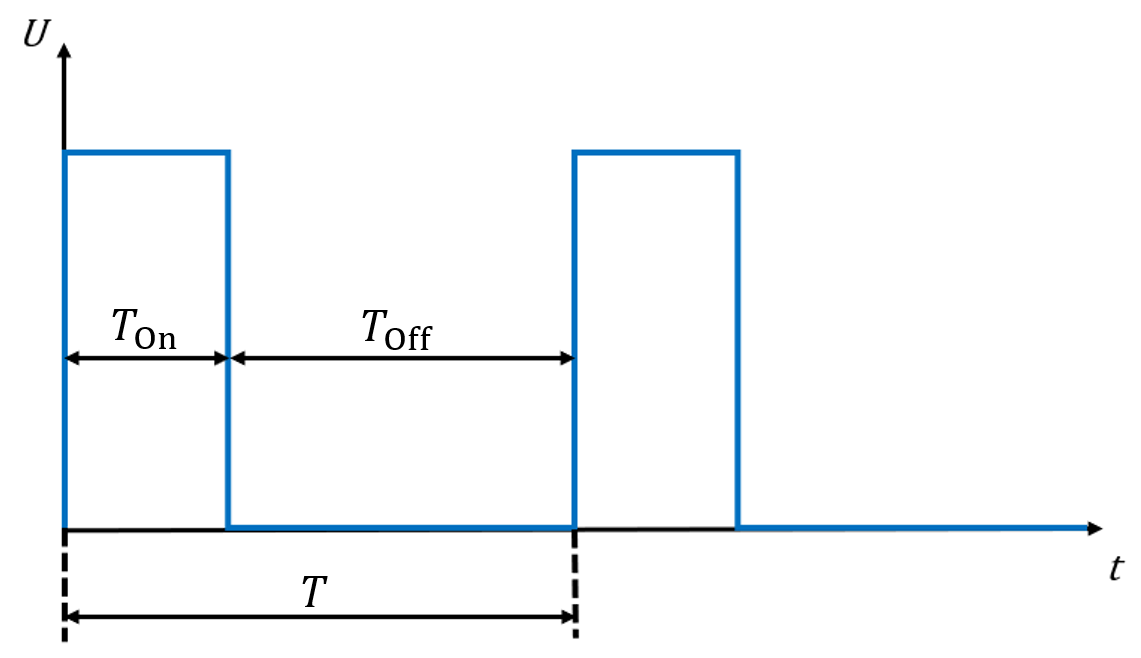
Abbildung 1: Pulsdauermodulation
Quelle: BBS2 Wolfsburg
In Abbildung 1 wird die Pulsdauermodulation grafisch dargestellt. \( T \) ist die Periodendauer des Rechteckpulses. Sie setzt sich zusammen aus der Anzeit \( T_{On} \) und der Auszeit \( T_{Off} \) des Rechteckpulses.
\( T=T_\mathrm{On}+T_\mathrm{Off} \)
Die Frequenz \( f_\mathrm{PWM} \) der Pulsdauermodulation lässt sich mit der Periodendauer berechnen.
\( f_\mathrm{PWM}=\frac{1}{T}=\frac{1}{T_\mathrm{On} + T_\mathrm{Off}} \)
Der Tastgrad \( D \) (englisch: duty cycle) bestimmt das Verhältnis zwischen der Anzeit und der Periodendauer.
\( D=\frac{T_\mathrm{On}}{T} \)
Die Auflösung \( n \) gibt an, wie klein der Rechteckpuls aufgeteilt bzw. aufgelöst werden kann. Die minimale Anzeit \( T_\mathrm{OnMin} \) lässt sich wie folgt aus der Auflösung \( n \) in bit berechnen:
\( T_\mathrm{OnMin}=\frac{T}{2^n-1} \)