Servo
Abschlussbedingungen
Abbildung: Servomotor Quelle: BBS2 Wolfsburg
Beschreibung:
Mit dem Servo wird der Elektromotor durch die Steuerungseinheit bewegt und somit kontrolliert gesteuert.
Kenndaten:
VCC: 5 V
Signal: Analog
Wichtige Informationen:
Der Servo kann in beide Richtungen um 90° ausgelenkt werden und somit ist eine Rotation um 180° möglich.
Wird über PWM (Puls Width Modulation) gesteuert.
Verdrahtungsplan:
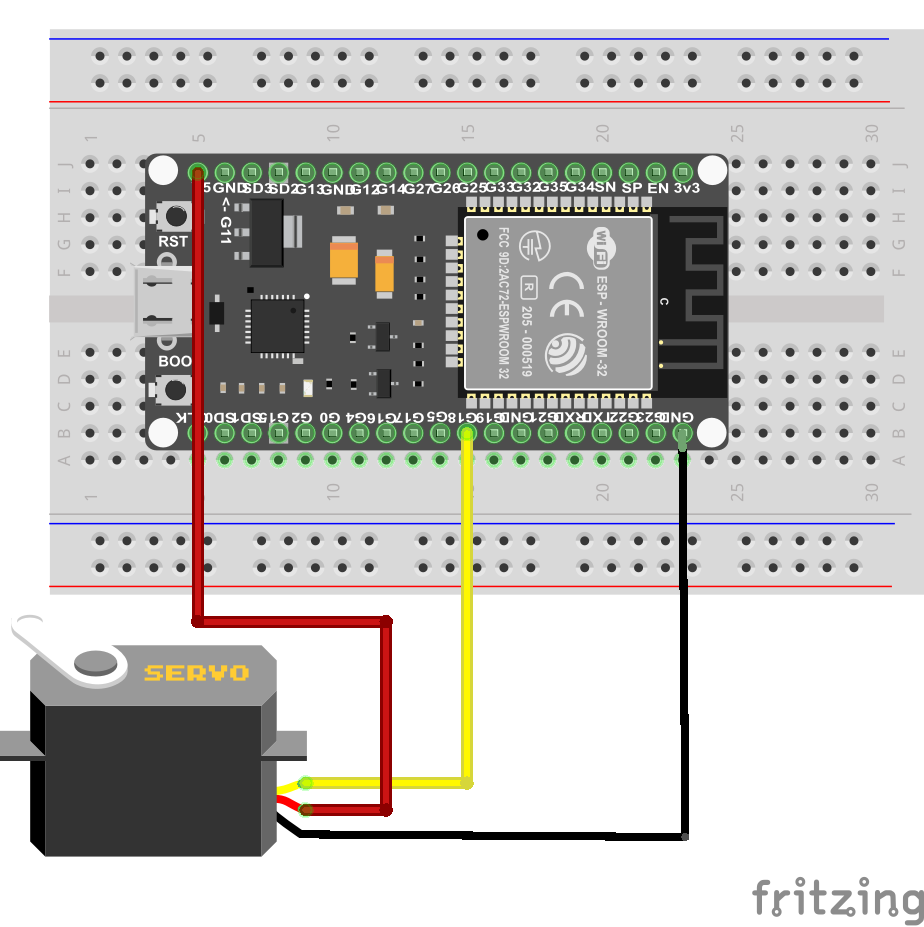
Abbildung: Servo-Verdrahtung Quelle: BBS2 Wolfsburg
Programmierbeispiel:
#include <ESP32Servo.h>
Servo myservo; // Servo-Objekt erstellt um Servo zu steuern
int pos = 0; // Variable für die Position des Servos
int servoPin = 18; // PWM Pin auf ESP32
void setup() {
// Timer zuweisen
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
myservo.setPeriodHertz(50); // Periode des Servos auf 50 Hz stellen
myservo.attach(servoPin, 1000, 2000); // deklarieren an welchem Pin der Servo ist
}
void loop() {
for (pos = 0; pos <= 180; pos += 10) // Geht in 10° Schritten auf 180°
{
myservo.write(pos); // Position des Servos festlegen
delay(15); // 15 ms warten
}
}Zuletzt geändert: Montag, 28. Juni 2021, 20:34