Programmierung
Lernziele:
- Bewegungsarten kennenlernen
- Bewegungsabläufe im Teach-In-Verfahren programmieren können
Allgemeines
Nach der grundsätzlichen Bedienung kommt es nun zur eigentlichen Programmierung des Roboters.
Der KUKA-Roboter kann auf zwei
verschiedene Weisen neue Bewegungsabläufe erlernen. Zum einen gibt es das
Teach-In-Verfahren, bei dem einzelne Punkte über verschiedene Bewegungen
kombiniert werden, sodass ein gesamter Ablauf entsteht. Zum anderen kann die KUKA-spezifische
Programmiersprache KRL (KUKA Robot Language) verwendet werden. Diese ist
deutlich komplexer und bietet im Vergleich zu dem Teach-In-Verfahren mehr
Möglichkeiten, welches jedoch zu Übungszwecken zu komplex wäre.
Grob zusammengefasst verläuft das Teach-In-Verfahren immer folgendermaßen:
Nachdem ein neues Programm erstellt wurde:
Eine Kombination aus der kartesischen und achsenspezifischen Verfahrensart erleichtert dieses.
![]()
4. Alternativ kann auch eine bestehende Bewegung
angepasst werden, falls z.B. die Koordinaten des Punktes nicht mehr stimmen.
Dazu wird die Bewegung markiert und über die „Touch-Up“-Funktion nur die
aktuelle Position des Roboters gespeichert.
5. Durch Wiederholen dieser Schritte entsteht schließlich ein fertiges Programm.
Bewegungsarten
Nachfolgend wird genauer auf die Bewegungsarten eingegangen.
Für die Programmierung sollten die drei wichtigsten Bewegungsarten bekannt sein. Durch geschickte Kombination können so flüssige Bewegungsabläufe entstehen.
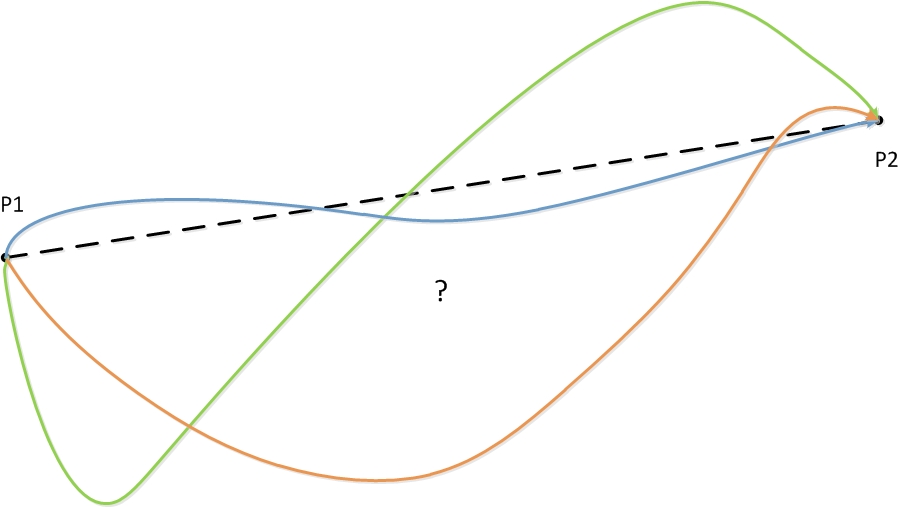
PTP (Point-to-Point)
PTP ist eine achsenspezifische
Bewegungsart, die für den Roboter am schnellsten durchführbar ist. Dieses wird
aber nicht unbedingt der kürzeste Weg sein, da sich die Achsen rotorisch
bewegen und dadurch geschwungene Bahnen entstehen. Die Bewegungen sind aus
diesem Grund nicht vorhersehbar und können in alle Richtungen geschwungen sein.
WANN verwende ich diese Bewegungsart?
Wenn der Roboter genügend Raum hat, um die Bewegung auszuführen, ist die PTP-Bewegung eine gute Wahl. Durch die rotorischen Bewegungen sind schnelle Abläufe möglich, die nicht zu stockend wirken. Man sollte trotzdem immer bedenken, dass es keine direkte Punkt-zu-Punkt-Bewegung ist und somit nicht optimal für ganz präzise Aufgaben geeignet ist (z.B.: Pfeifenaufnahme aus der Rutsche oder Durchlaufen des Gitter-Parcours).
LIN (Linear)
LIN ist eine geradlinige Bewegung. Der Greifer wird in einer konstanten Geschwindigkeit und in definierter Orientierung vom Start zum Zielpunkt bewegt. Die Achsen verfahren also so, dass der Greifer eine gerade Luftlinie zurücklegt.

WANN verwende ich diese Bewegungsart?
Wenn der Roboter sehr präzise
Arbeiten ausführen muss. Die vorgegebenen Punkte werden auf direktem Weg
angefahren, ohne von der vorgegebenen linearen Bewegungsbahn abzuweichen. Die
Bewegungsart sollte daher eher bei kleinen Distanzen verwendet werden, da bei einer
Kombination mehrerer LIN-Bewegungen der Ablauf teilweise ruckig und stockend
wirken würde.
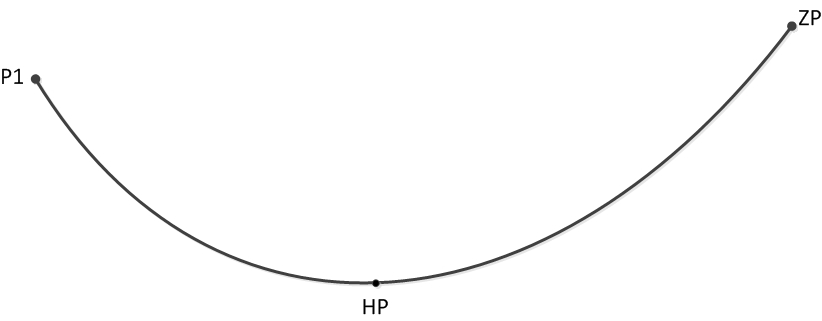
CIRC (circular)
CIRC eine kreisförmige
Bahnbewegung, die vom Startpunkt aus über einen Hilfspunkt zum Ziel ausgeführt
wird. Der Hilfspunkt ist dabei als äußerste Stelle des Kreises definiert.
WANN verwende ich diese Bewegungsart?
Wenn kreisförmige Bewegungen Bestandteil eines Gesamtprogramms sind. Sie ergänzen hauptsächlich PTP- und LIN-Bewegungen und erleichtern dem Bediener eine „perfekte“ Kreisbahn mit dem Roboter abzufahren. Anwendung findet diese Bewegungsart z.B. in der Übung 4, in der eine Rennstrecke mit Kurven abgefahren wird.
Inline-Formulare der Bewegungsarten
Anmerkung:
Bei genauer Betrachtung des Inline-Formulars fällt auf, dass verschiedene Einstellungen bei den jeweiligen Bewegungsarten vorzunehmen sind. Je nachdem, welche Bewegungsart im ersten Feld ausgewählt wird, passen sich die verbleibenden Felder an. Bei Bestätigung des Befehls wird eine neue Programmzeile generiert.
Beispielhaft ist hier das Inline-Formular einer PTP-Bewegung dargestellt.
Inline-Formular einer PTP-Bewegung

Zudem die Einstellungen:
- Konfiguration
des Optionsfensters "Frames" (Tool, Base, Externer TCP und
Kollisionserkennung)
- Auswahl eines Bewegungsdatensatzes
- Konfiguration des Bewegungsdatensatzes (Beschleunigung, Überschleifdistanz, Orientierungsführung)
Die angezeigte Kollisionsüberwachung ist nur zum Schutz des Roboters und bewahrt niemanden vor Verletzungen. Es ist eine Überwachung der Drehmomente und Achsen, sodass die zusätzlichen Schutzeinrichtungen auf keinen Fall entfallen können.
Auf zwei der Felder des Inline-Formulars soll hier genauer eingegangen werden.
Geschwindigkeit
Zum einen wird die Geschwindigkeit in % (bzw. m/s) angegeben. Der Bediener sollte sich bei dieser Einstellung an dem Bewegungsablauf orientieren. Je nachdem, was für eine Aufgabe der Roboter auszuführen hat, ist eine höhere oder niedrigere Geschwindigkeit angebracht.
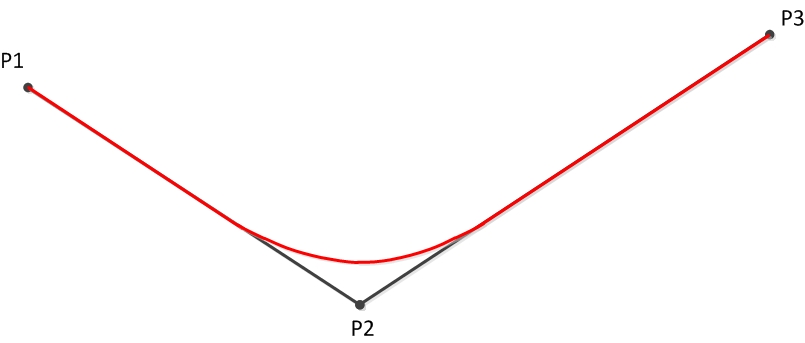
Überschleifen
Zum anderen gibt es die Möglichkeit, Bewegungen zu überschleifen (CONT). Standardmäßig würde der Roboter jeden vorgegebenen Punkt auf den Millimeter genau anfahren. Dafür würde er unter anderem die Geschwindigkeit drosseln, um das so präzise wie möglich zu schaffen. Schließlich würde er auf dem Punkt kurz verharren und danach in die nächste Bewegung starten.
Optimaler ist es, die gespeicherten Punkte nur als
Orientierung zu nutzen. Dafür sollten diese allerdings nicht Teil einer
bestimmten Aktion sein (z.B. Greifen oder Schweißen). Mithilfe des
Überschleifens wird dem Roboter ein definierter Wert übergeben, um den er den
eigentlichen Punkt verfehlen darf. Dadurch wird die Bewegung des Roboters
flüssiger und es sind höhere Geschwindigkeiten möglich. Bei einer guten
Programmierung sind in dem Bewegungsablauf des Roboters keine Pausen aufgrund
von einzelnen Bewegungen erkennbar.
Bei der Einstellung im Inline-Formular öffnet sich ein zusätzliches Fenster, in dem die Überschleifdistanz eingegeben werden kann. Der Wert sollte dabei nicht einfach willkürlich gewählt werden, da sonst der Roboter beschädigt werden kann. Der Bediener sollte sich über die Grenzen des Arbeitsraumes bewusst sein und ggf. die Überschleifdistanz nur langsam erhöhen.

Unterschiede zwischen den Inline-Formularen der verschiedenen Bewegungsarten
Im Vergleich zu den Inline-Formularen für die LIN- und CIRC- Bewegungen lassen sich nur wenige Unterschiede feststellen. Diese werden zum besseren Verständnis jedoch einmal aufgezeigt.
Zuerst lässt sich erkennen, dass die Geschwindigkeit einer
LIN-Bewegung nicht mehr in %, sondern nun in m/s angegeben wird. Diese Änderung
sollte man bei der Einstellung beachten, damit keine falschen Werte eingetragen
werden.

Gleiches gilt für die CIRC-Bewegung. Diese besitzt zudem ein
weiteres Feld zur Wahl des Hilfspunktes. Die Werte können wieder einfach mit
der Touch-Up-Funktion festgehalten werden.

Anmerkung:
Änderungen können an jedem Inline-Formular immer über den
Button „Ändern“ vorgenommen werden.
Bewegungsbefehle ändern
| Gründe |
Durchzuführende Änderung |
|---|---|
- Position des zu greifenden Teils ändert sich - eine Schweißnaht muss verkürzt werden |
- Änderung der Positionsdaten |
| - Lage eines Behälters oder einer Karosserie ändert sich |
- Änderung der Framedaten: Basis |
| - eine Position wurde mit dem falschen Werk- zeug geteacht |
- Änderung der Framedaten Basis und/oder - Tool mit Aktualisierung der Position |
| - die Taktzeit muss verbessert werden |
- Änderung der Bewegungsart, Geschwindigkeit oder Beschleunigung |
Im Folgenden finden Sie ein Beispielvideo zum Anlegen einer neuen Programmzeile auf dem smartPad: