Bewegungsmodi
Der Dobot hat drei verschiedene Wege, um von einem Punkt im Raum zum anderen zu kommen.
MOVL:
MOVL bedeutet "Linear Movement" (also zu deutsch: Lineare Bewegung). Bei diesem Bewegungsmodus versucht der Dobot von einem Punkt zum anderen in einer möglichst linearen und geraden Bewegung im Raum zu gelangen.
MOVJ:
MOVJ bedeutet "Joint Movement" (also zu deutsch: Gelenkbewegung). Bei diesem Bewegungsmodus versucht der Dobot im Gegensatz zu MOVL nicht auf direktem linearen Weg von einem Punkt zum anderen zu gelangen. Stattdessen verläuft jedes Gelenk vom Anfangs- zum Zielwinkel, unabhängig von der Bewegungsstrecke. Dabei können eben auch krumme Strecken entstehen, wie in der unteren Abbildung zu sehen ist.
Kurz gesagt: Bei MOVJ ist der Dobot am schnellsten, da er versucht so wenig Achsen wie möglich zu beanspruchen. Je mehr Achsen genutzt werden müssen, desto langsamer ist der Dobot.
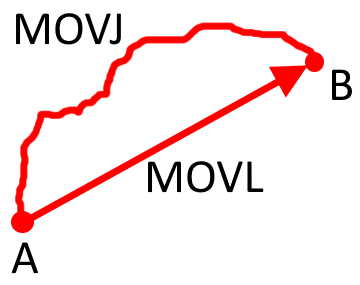
Bild 1: Unterschied MOVL und MOVJ
JUMP:
Beim Bewegungsmodus JUMP wird die Bewegung ähnlich zu MOVJ ausgeführt. Der Unterschied ist nur, dass vom ersten Punkt aus der Arm um eine gewisse Höhe angehoben wird, dann bewegt wird über den nächsten Punkt und dort wieder um die gleiche Höhe abgesenkt wird.
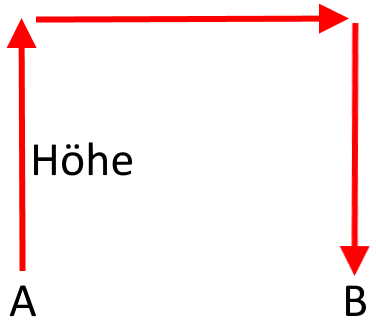
Bild 2: JUMP Bewegungsmodus
In diesem Video wird nochmal näher auf die beiden ersten Bewegungsarten eingegangen (auch wenn ein Cobot von KUKA behandelt, sind die Erklärungen der Bewegungen identisch):