Arten der Bewegungsprogrammierung
Die Bewegung des Dobots kann über verschiedene Wege programmiert werden.
Achtung: Die Programmierung kann erst erfolgen, wenn die ersten Schritte im Abschnitt "Programm in DobotStudio vorbereiten" durchgeführt wurden.
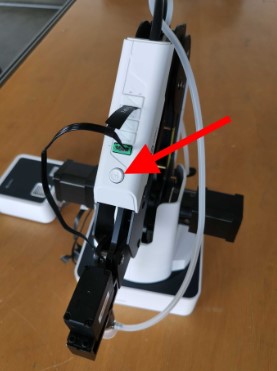
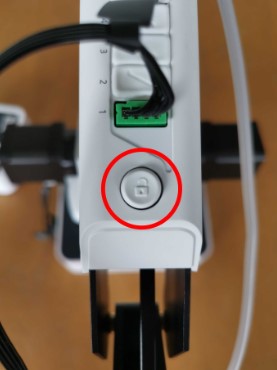
1. Teach & Playback:
Der Dobot wird über den Entsperrknopf auf dem Arm (siehe Bild darunter) in eine beliebige Position innerhalb seiner Reichweite bewegt. Dabei muss der Knopf die ganze Zeit gedrückt gehalten werden. Das Loslassen desselben Knopfes lässt den Dobot in seiner Position verharren. Daraufhin registriert DobotStudio die Position und vermerkt sie. Wenn der Prozess wiederholt wird mit einer anderen Position, dann wird auch dieser Punkt registriert.
2. Bewegung über die Achsen:
Über die Achsen, welche mit dem Buchstaben "J" gekennzeichnet sind (steht für "Joint", was zu deutsch "Gelenk" bedeutet), kann die Position des Dobots variiert werden. Dabei wird z.B. mit J1+ die Achse 1 in positive Richtung bewegt. Der Pfeil auf dem Bild zeigt in welche Richtung die Achse positiv dreht.
Falls das Menü rechts nicht zu sehen ist, kann es über den Pfeil auf der rechten Seite ausgeklappt werden.
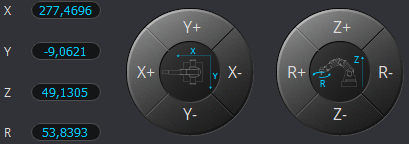
DobotStudio Ausschnitt:

Visualisierung der Achsensteuerung:

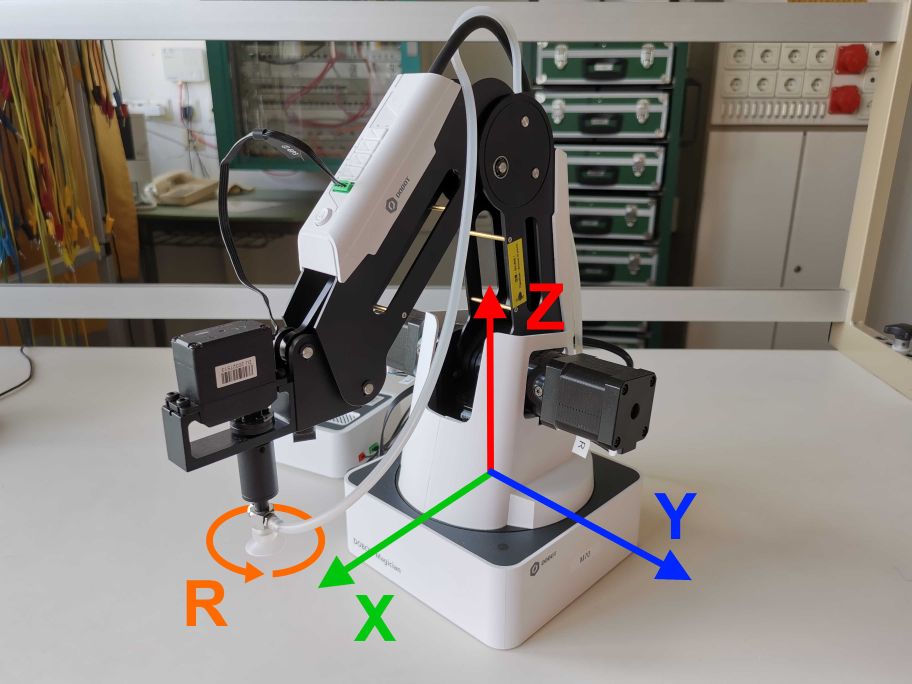
3. Bewegung über das Koordinatensystem:
Die Position des Dobots kann variiert werden über das dreidimensionale Koordinatensystem. Dabei sind die Achsen mit X, Y und Z belegt. Der Pfeil im Bild zeigt in welche Richtung die Achse positiv verläuft. Zusätzlich zum Koordinatensystem kann hierbei mit R+ und R- die vierte Achse am Saugnapf-Kit angesteuert werden.
Falls das Menü rechts nicht zu sehen ist, kann es über den Pfeil auf der rechten Seite ausgeklappt werden.
DobotStudio Ausschnitt:
Visualisierung des Koordinatensystems: