IO-Pin Auswahl
Einen Eingangspin wählen
Im nächsten Schritt werden die passenden Pins zur Kommunikation zwischen SPS und Dobot ausgewählt.
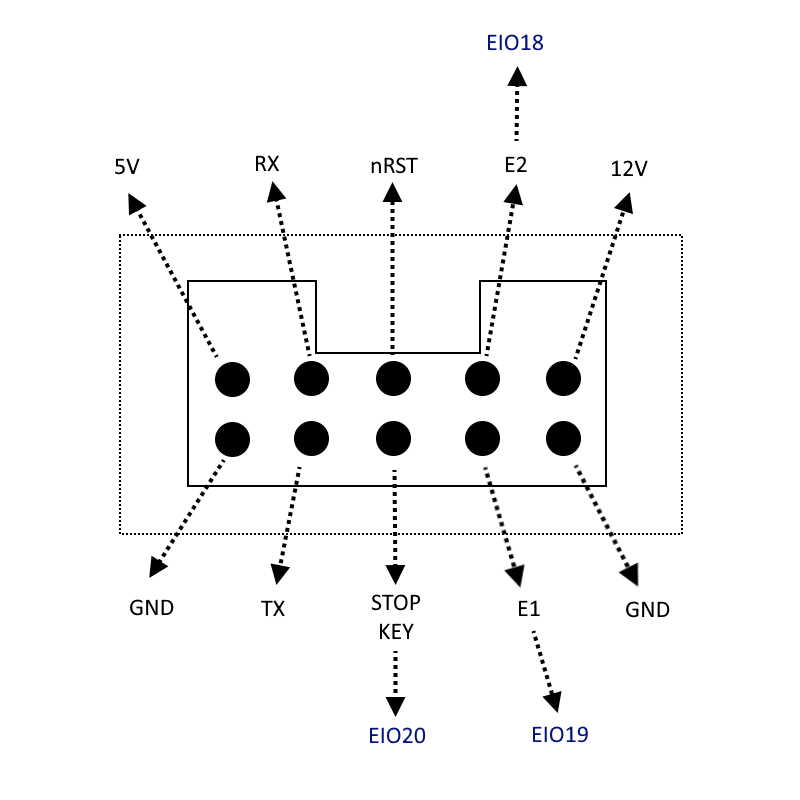
Für den Eingangspin schauen wir uns das UART Interface an, welches auf dem Dobot mit Communication Interface beschriftet ist. Dazu betrachten wir die folgende Abbildung zusammen mit der Tabelle.
|
I/O adressing |
Voltage |
Level Output |
PWM |
Level Input |
ADC |
|
18 |
3,3 V |
√ |
- |
- |
- |
|
19 |
3,3 V |
- |
- |
√ |
- |
|
20 |
3,3 V |
- |
- |
√ |
- |
Als Eingangspin können wir zunächst den Pin 18 ausschließen. Dieser hat nämlich keinen Level Input, sondern nur einen Level Output. Somit ist er ungeeignet. Pin 19 und Pin 20 haben beide jeweils einen Level Input und erfüllen somit die Anforderungen. Schauen wir jedoch in die Abbildung oder in die Interface Description, so stellen wir fest, dass der Pin 20 mit der Funktion "STOP KEY" beschrieben ist. Wenn dieser Pin also angesteuert wird, so stoppt der Dobot seine Bewegung. Unser Eingangssignal soll jedoch die Bewegung initiieren. Der Pin 20 mit seiner Stop-Funktion ist für unseren Fall nicht einsetzbar.
Pin 19 erfüllt alle benötigten Kriterien und ist nicht für eine bestimmte Funktion reserviert. Daher wählen wir Pin 19 als Eingangspin.
Einen Ausgangspin wählen
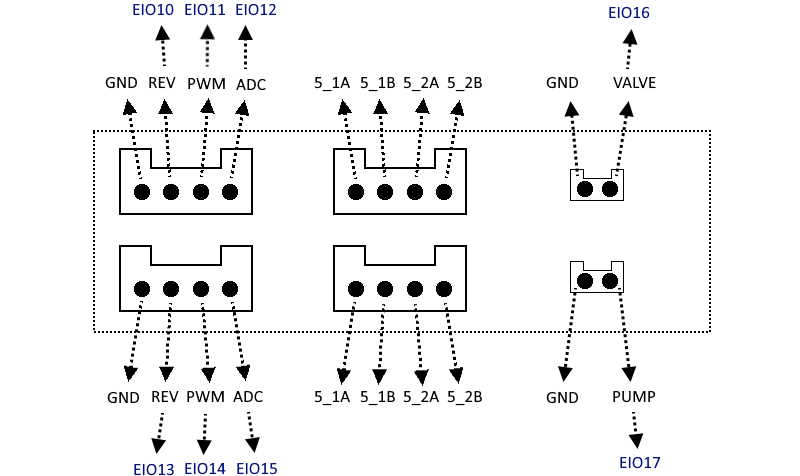
Für die passende Auswahl eines Ausgangspins betrachten wir die Peripherie Schnittstelle, welche auf dem Dobot mit GP1, GP2, Stepper1, Stepper2, SW1 und SW2 beschriftet ist. Die Abbildung und Tabelle zeigt die Schnittstelle.
|
I/O adressing |
Voltage |
Level Output |
PWM |
Level Input |
ADC |
|
10 |
5 V |
√ |
- |
- |
- |
|
11 |
3,3 V |
√ |
√ |
- |
- |
|
12 |
3,3 V |
- |
- |
√ |
- |
|
13 |
5 V |
√ |
- |
- |
- |
|
14 |
3,3 V |
√ |
√ |
√ |
- |
|
15 |
3,3 V |
√ |
- |
√ |
√ |
|
16 |
12 V |
√ |
- |
- |
- |
|
17 |
12 V |
√ |
- |
- |
- |
Mit ausgestattetem Saugnapf-Kit sind bereits die Schnittstellen GP1 und SW1 besetzt. Das bedeutet Pin 10, 11, 12 und 16 sind nicht verwendbar, wobei Pin 12 sowieso nur ein Eingangspin ist.
Pin 17 von SW2 ist reserviert für die Funktion Pumpen, wodurch wir diesen nicht einsetzen können.
Zur Verfügung stehen noch Pin 13, 14 und 15. Aus der Tabelle erfahren wir, dass Pin 14 mit einer Pulsweitenmodulation (PWM) und Pin 15 mit einer Analog-Digital-Umwandlung versehen werden kann. Beide Pins bieten zusätzlich auch einen Level-Input. Pin 13 hat hingegen nur den Level Output. Daher reicht uns Pin 13 als Ausgangspin.
Zuletzt geändert: Mittwoch, 8. Juni 2022, 11:26