Beispiel 1: Micro-Control-Demostation
Micro-Control-Demostation
Im Rahmen einer Teil 2 Prüfung wurde eine Demostation aufgebaut, um die Regelungstechnik kennenzulernen und praktisch einen Einblick in diese zu erhalten. Als Aufgabe soll die Temperatur in einem Plexiglaswürfel, der mit einer 24V Lampe geheizt wird, über einen kleinen 12V-Lüfter auf einen konstanten, vorgegebenen Wert geregelt werden. Dies soll durch zwei unterschiedliche Regelungsverfahren erreicht werden, einerseits durch eine Zweipunktregelung, andererseits durch eine PID-Regelung. Als speicherprogrammierbare Steuerung steht dafür eine Siemens Simatic S7-1200 mit analogem Ausgang zur Verfügung. Die Micro-Control-Demostation sieht folgendermaßen aus:


Zweipunktregelung
Die Zweipunktregelung ist die einfachste Regelungsart. Sie ist im Gegensatz zu den bisher vorgestellten Regelarten ein unstetig arbeitender Regler mit zwei Ausgangszuständen. Je nachdem ob der Istwert über oder unter dem Sollwert liegt, wird der obere oder untere Ausgangswert eingenommen. Eingesetzt werden Zweipunktregler normalerweise, wenn die Stellgröße nicht stetig variabel ist, sondern nur zwei Zustände annehmen kann, z.B. Ein/Aus. Der eingeschwungene Zustand kann erreicht werden, der Zweipunktregler kommt dabei aber nie zur Ruhe. Die Regelabweichung kann bei starken Änderungen der Führungsgröße mit dieser Regelart schneller ausgeregelt werden, als es mit anderen Regelarten möglich ist. Um schnelle Schwingungen des Ausganges zu vermeiden, haben Zweipunktregler immer eine eingebaute Hysterese, d. h. einen Totbereich um den Sollwert, um den sich der Istwert ändern muss, damit ein Umschalten in den gegenteiligen Ausgangszustand bewirkt wird. Ein Thermostat schaltet beispielsweise ein Heizgerät beim Erreichen von 21 °C ab, aber erst beim Unterschreiten von 18 °C wieder ein, was einer Hysterese von 3 °C entspricht. Der Regler und die Hysterese können mechanisch oder elektronisch realisiert werden.
Die Darstellung des Zweipunktreglers:
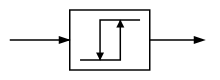
Abb. 2: Zweipunktregler, Quelle: s. Abbildungsverzeichnis
Diese Regelungsart wurde einmal als Grundlage für die Programmierung der Micro-Control-Demostation verwendet. Bei Überschreitung des vorgegebenen Sollwertes wird der Lüfter mit maximaler Drehzahl betrieben, bei gleicher oder niedrigerer Temperatur des Istwertes soll der Lüfter ausgeschaltet sein. Dieses Verhalten ist hier anschaulich zu beobachten:
PID-Regelung
Die Anlage wurde mit einer PID-Regelung programmiert und parametriert. Die optimalen Parameter für den P-, I- und D-Anteil wurden durch das Programm in einem selbst durchgeführten Test ermittelt. Das Anlaufverhalten ist hier in zwei Videos dargestellt, die Lüfterbewegung von außen beobachtet (bei genauem Betrachten ist die Veränderung des Ausgangswertes in der unterschiedlich schnellen Lüfterbewegung zu erahnen) und das Verhalten der relevanten Werte in einem Graph visualisiert (mit Step 7 Professional V11). Der Graph zeichnet den Ist-, Soll- und Ausgangswert der Regelung auf.
Video 2: PID-Regler im Betrieb, Quelle: BBS 2 Wolfsburg
Es existiert ein Leitfaden für die Siemens S7-1200, in dem beide Regelungsarten behandelt werden, um die Erstellung der dargestellten Projekte an der Micro-Control-Demostation selbst durchführen zu können: