Motoren
Die Grundlage für die Objektverfolgung steht bereits. Nun müssen wir uns um den Antrieb für unseren autonom fahrenden T1 kümmern.
Bevor wir beginnen das Fahrgestell für unseren T1 zu entwickeln und zusammenzubauen, müssen wir schauen, welche Motoren wir überhaupt verwenden. Der T1 soll über eine lenkende Vorderachse und über einen Hinterradantrieb verfügen. Dafür benötigen wir vorne für die Lenkachse einen Servo-Motor und hinten einen Gleichstrom Getriebe-Zahnrad-Motor.
Servomotor
Ein Servomotor hat einen Bewegungsradius von 180 Grad. Er wird angesteuert, indem man ihm Informationen zu dem einzustellenden Winkel übergibt. Er stellt sich dann auf diesen Winkel ein und bleibt still stehen, bis er veränderte Anweisungen erhält.
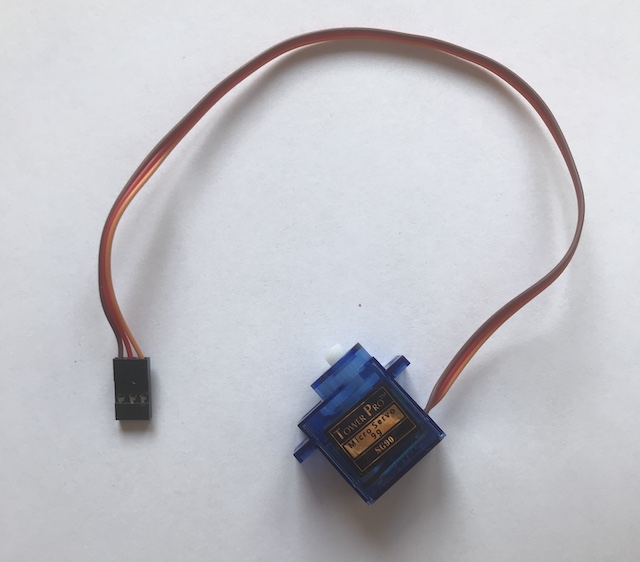
Bild: Servomotor
Quelle: BBS2 Wolfsburg
Wie man einen Servomotor ansteuert und testen kann, erfährst du hier:
In dem Datei-Ordner findest du auch ein Demoprogramm, mit dem du die Funktion deines Servos testen kannst.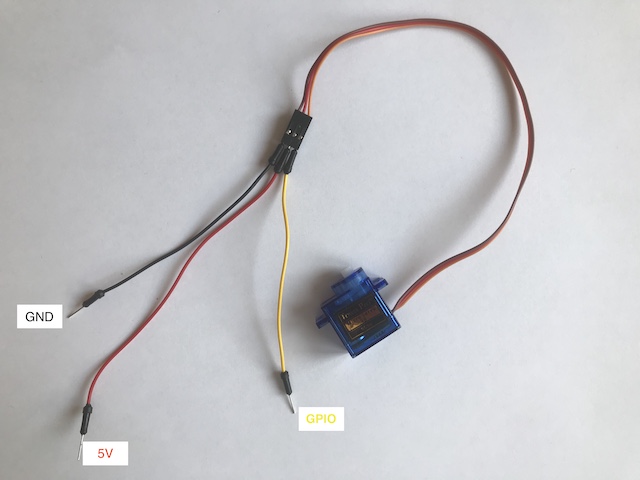
Bild: Servomotor Anschlüsse
Quelle: BBS2 Wolfsburg
Gleichstrommotor
Ein Gleichstrommotor hat dagegen einen Bewegungsradius von 360 Grad. Daher eignet er sich perfekt für den Antrieb des T1.
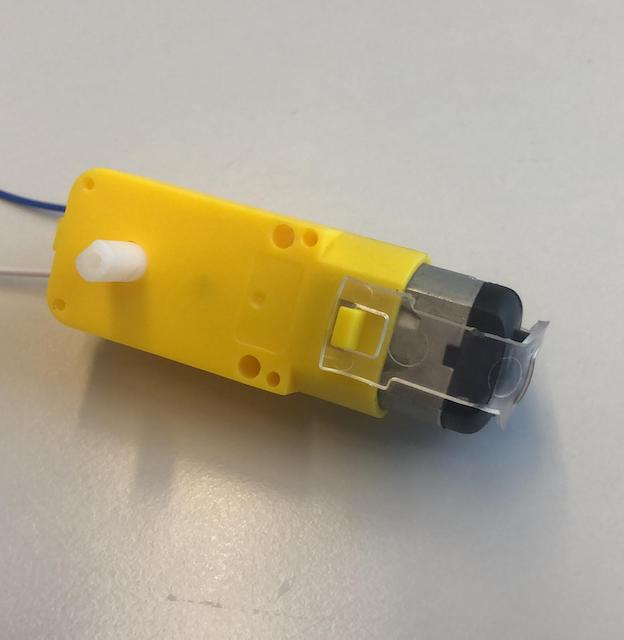
Bild: Gleichstrommotor
Quelle: BBS2 Wolfsburg
Um den Gleichstrommotor anzusteuern sind jedoch höhere Ströme erforderlich, als sie durch einen Microcontroller möglich wären. Deshalb wird für den Antrieb eines Gleichstrommotors ein Motortreiber verwendet.
An die Kontakte des Gleichstrommotors müssen zwei Leiterverbindungen gelötet werden, die dann an die Ausgänge des Motortreibers angeschlossen werden.
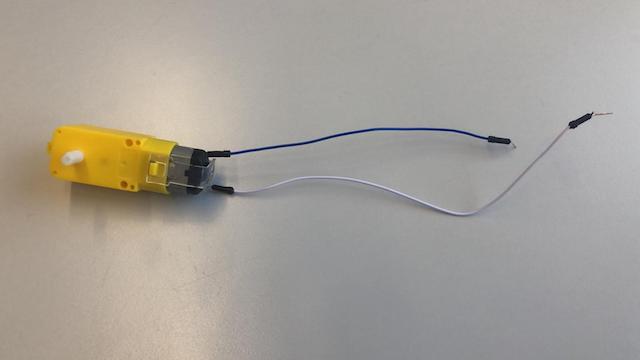
Bild: Gleichstrommotor mit angelöteten Leiterverbindungen
Quelle: BBS2 Wolfsburg
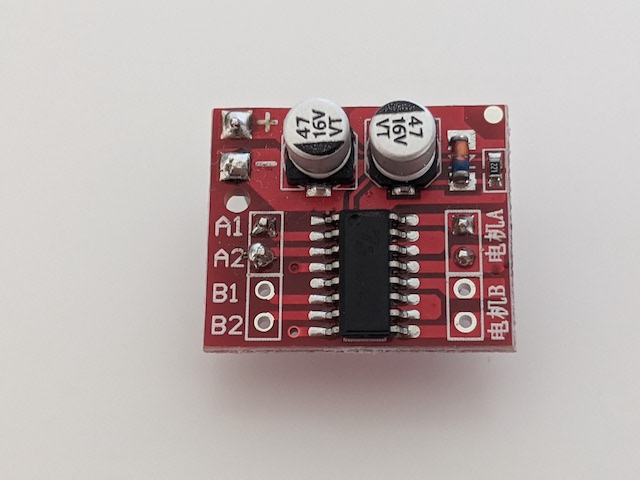
Motortreiber
Mithilfe des Motortreibers wird erreicht, dass der Gleichstrommotor mit genügend Strom versorgt wird.
An den Eingang des Motortreibers wird der Microcontroller angeschlossen, der Informationen über den einzustellenden Antrieb übergibt. Soll der Motor vorwärts oder rückwärts laufen? Soll er stehen?
Außerdem ist der Motortreiber an eine extra Spannungsquelle angeschlossen. Mithilfe dieser erreicht er höhere Ströme für den Gleichstrommotor.
An den Ausgang des Motortreibers ist der Gleichstrommotor angeschlossen.